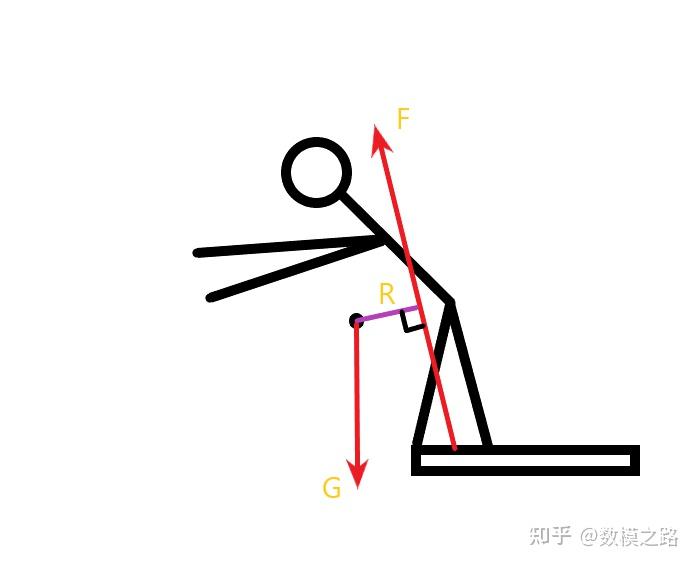
其中, \sum_i 表示对身体各个部分的求和; M i表示身体的第i 部分的质量; Yi表示与转动轴线的距离; M 表示运动员总的质量, R 表示回转半径。
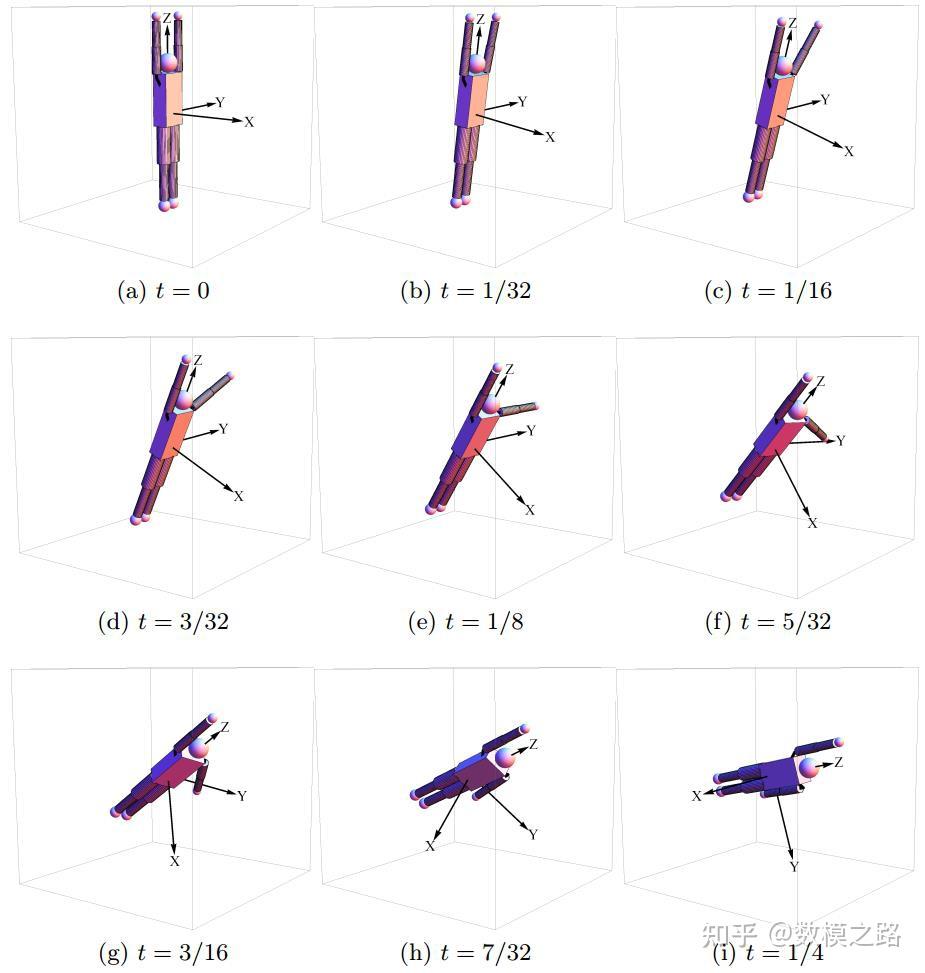
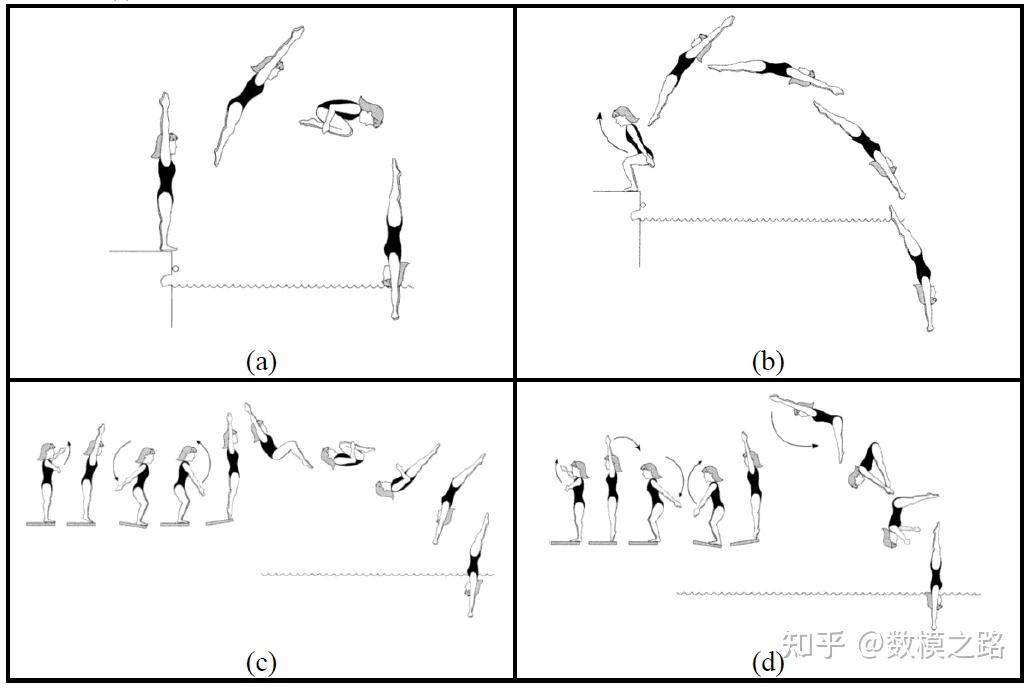
本文发现,运动员离开跳台后,由于总的角动量保持一致,因此运动员可以通过改变空中姿势(直体、屈体和抱膝)来改变转动的角速度。除空中动作外,起跳动作对于一套跳水动作的成功与否也起着重要的作用。图6(a)-(f)所示为跳水运动中六组不同的起跳动作,(a)为面对池向前跳水、(b)为面对板/台向后跳水、(c)为面对池反身跳水、(d)为面对板/台向内跳水、(e)为转体跳水、(f)为臂立跳水。
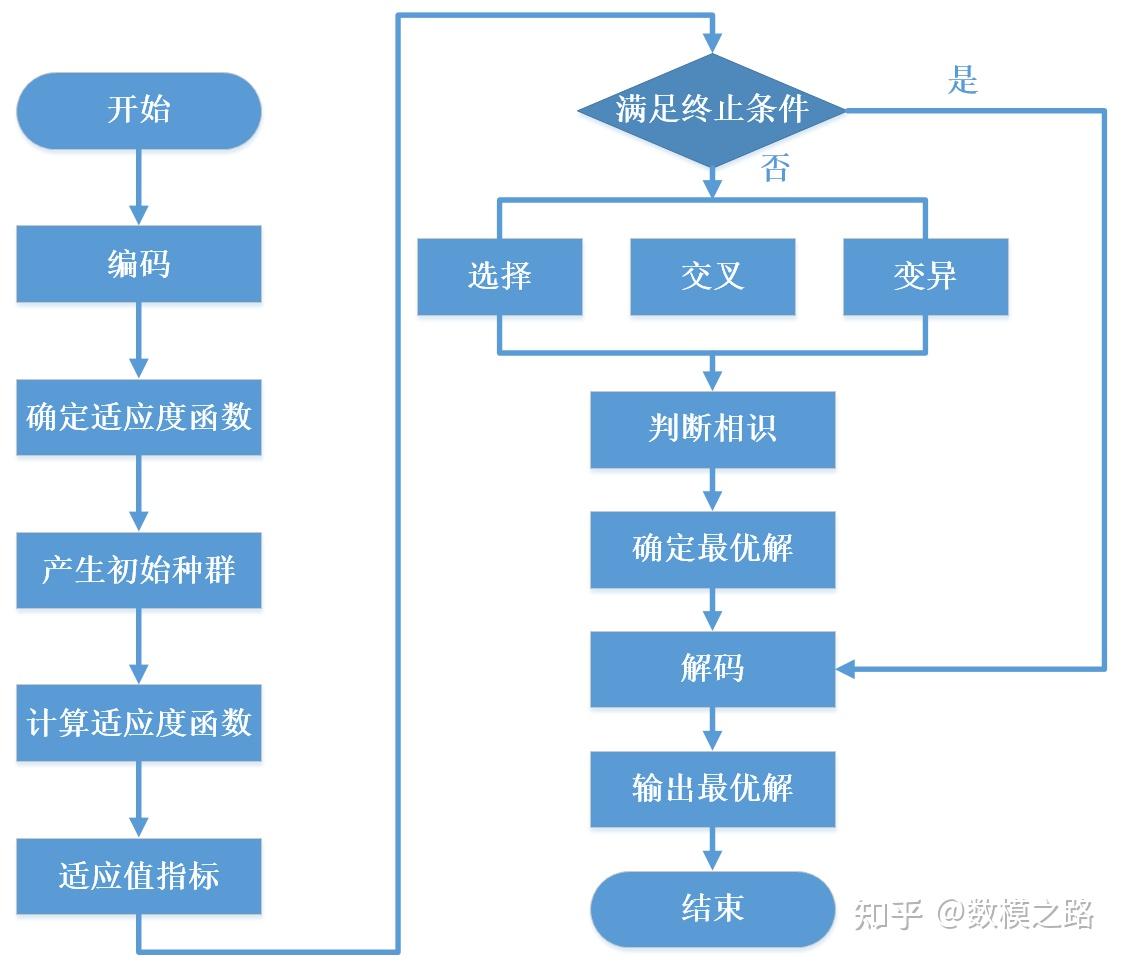
传统遗传算法参数中交叉概率和变异概率的选择是影响遗传算法行为和性能的最关键因素。若交叉概率过大,遗传模式被破坏几率变大,使得具有高度适应度的个体很快被破坏;若交叉概率过小,会使搜索过程缓慢,一直停滞不前。美国密歇根大学Holland 等提出一种自适应遗传算法,交叉概率与变异概率能够随着个体适应度大小而自动改变。当种群个体适应度趋于一致或者局部最优时,增加交叉概率和变异概率;当群体适应度比较分散时,使得交叉概率和变异概率减小。
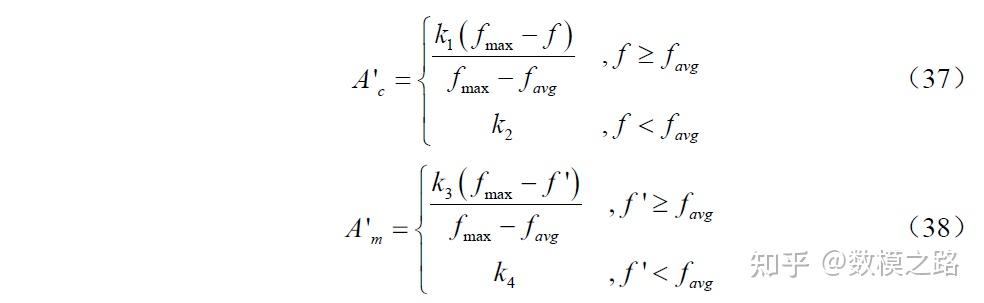
本文采用自适应遗传算法对待求参数进行迭代优化,自适应算法的交叉概率'c A 和变异概率'm A 的计算方法如下: